
")
")
")
Ground Penetrating Radar
Detailed subsurface data with specialized drone-mounted GPR systems
How it works
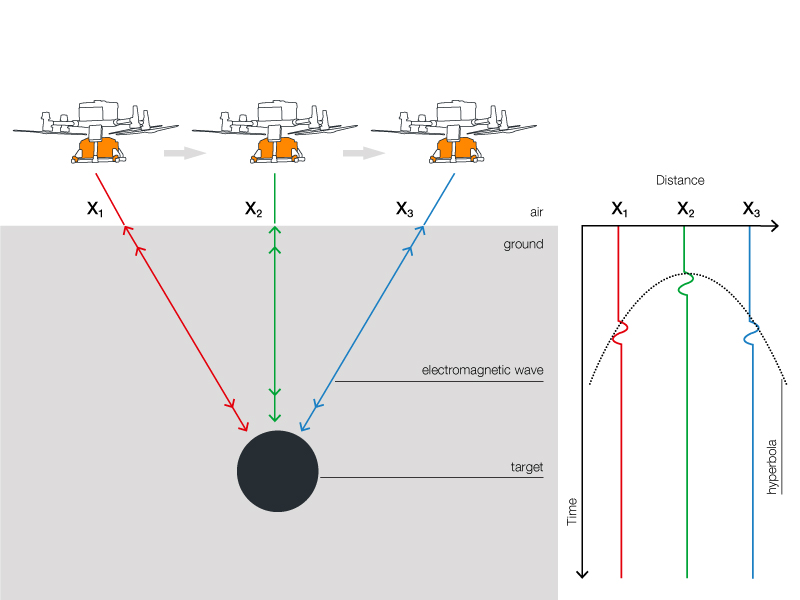
Ground Penetrating Radar (GPR) uses radar pulses to detect and image underground objects and features. A GPR transmitter emits electromagnetic energy into the ground. When the energy encounters a buried object or a boundary between materials having different dielectric permittivities (a property that defines the speed of electromagnetic waves), it may be reflected to the receiving antenna of GPR. The GPR electronics can then record the variations in the return signal.
Deliverables
GPR data comes from the sensor in digital form and is not meant for direct human interpretation, unlike photos from cameras. It requires specialized software for processing and interpretation.
These methods of GPR data representation are the most popular, but many additional options exist, including export into formats that can be imported into CAD and GIS systems.
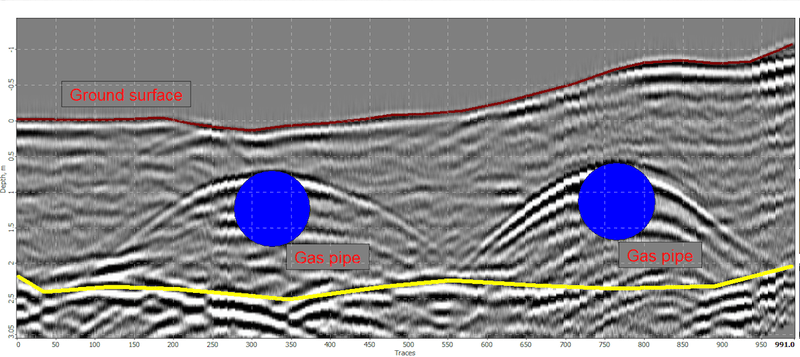
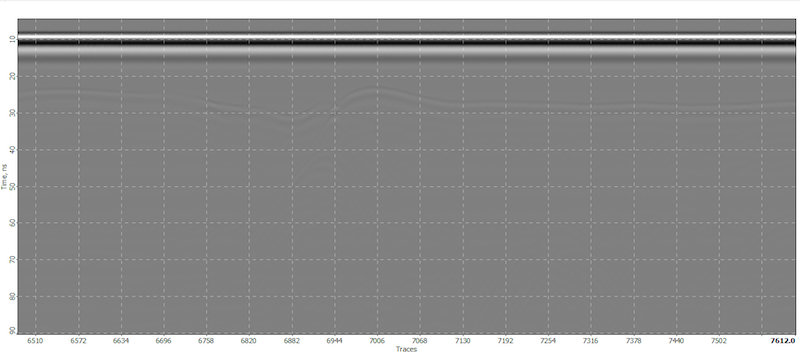
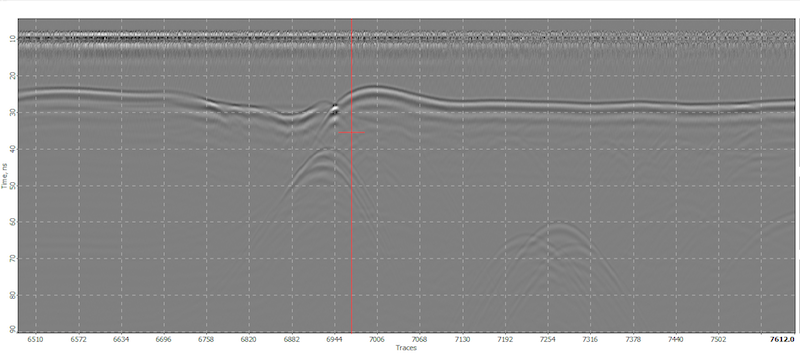
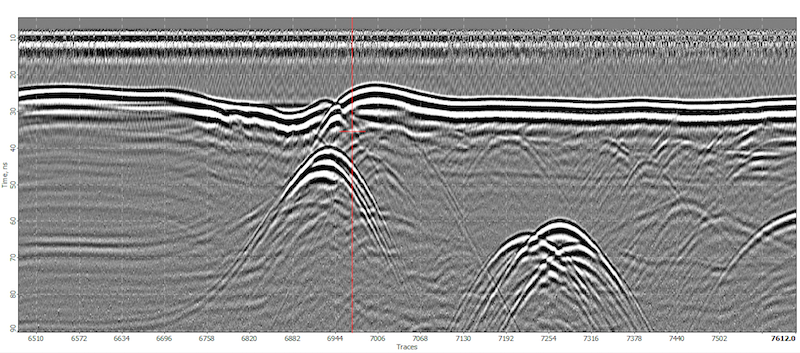
Fig.2 - GPR profile crossing a gas pipeline with interpretation. Data was collected using the Zond Aero 500 GPR system, processed, and interpreted in Radar Systems Prism2 software
The results of GPR surveys can be presented in different forms. The most common and “natural” format for GPR data is a “profile” - a vertical slice of data along the survey line.
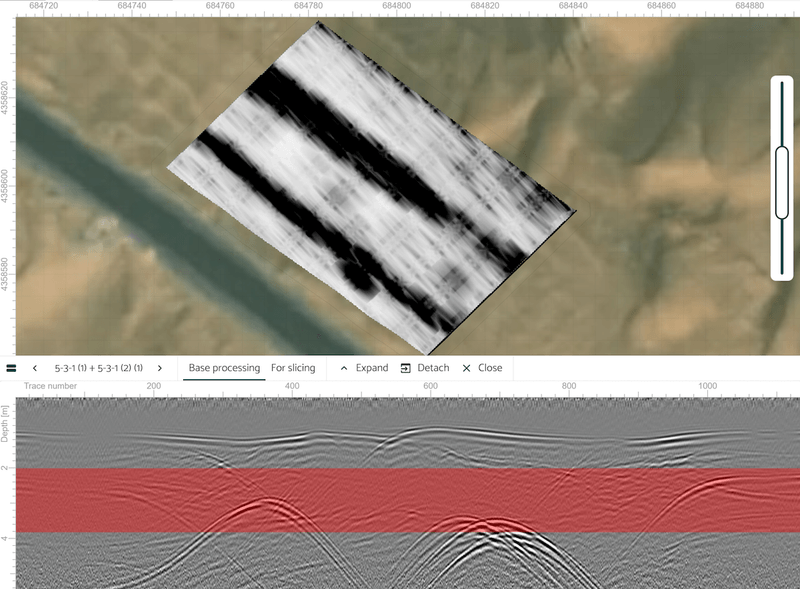
Fig.3 - Horizontal slice of the subsurface to visualize the path of utilities. Data was collected using the Zond Aero 500 GPR system and processed in Geolitix
Another popular form is horizontal slices, as they give a better understanding of where the detected objects are under the surface and about the shape of objects.
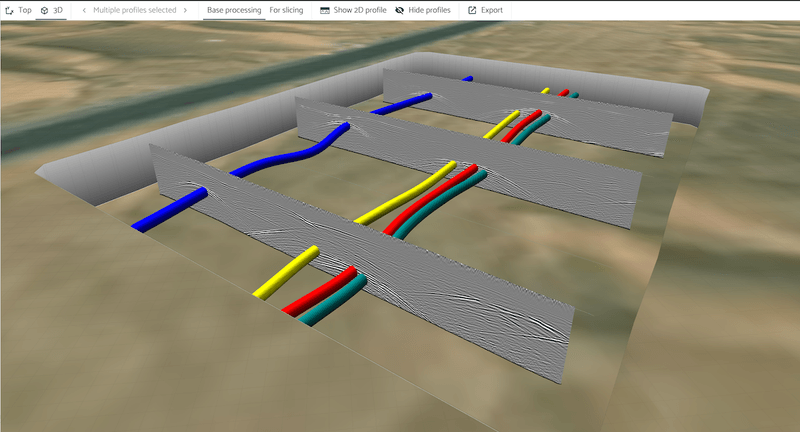
Fig.4 - 3D representation of the same utilities as on the image with horizontal slices. Screenshot of Geolitix
Many customers prefer to see 3D reconstructions of the underground world - and that is also possible. It will require more processing and preparation steps, but as this method gives maximum understanding in complex situations, it becomes more and more popular, thanks to modern GPR processing software radically simplifying that task.
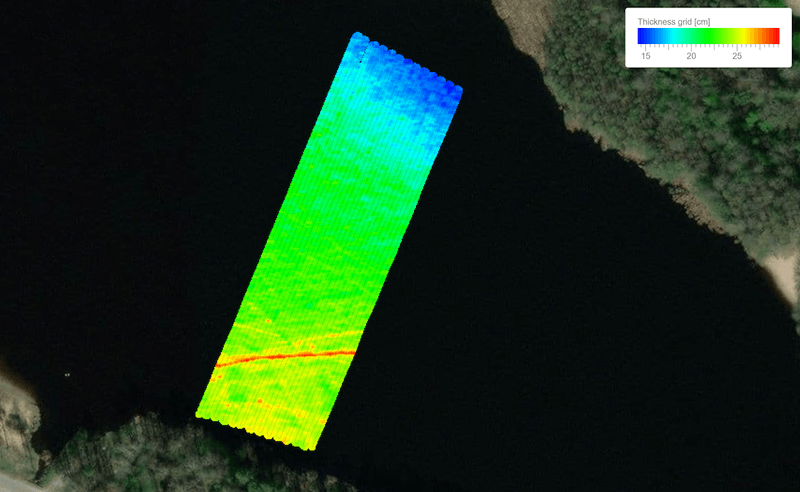
Fig.5 - Ice thickness grid. Data was collected using the Zond Aero 1000 GPR system and processed in Geolitix
One more popular method is to generate thickness grids, for example, to answer questions like “How thick is the sand layer covering bedrock” or “How thick is the ice”.
Benefits of drone-mounted GPR
- Rough terrain where surface surveys may be impossible (ice and snow-covered ground, rocky and uneven terrain, across rivers and in avalanche-prone areas)
- Areas with safety or health risks for the operator (glaciers with crevices, contaminated soils, etc.)
- Large unobstructed areas where the productivity of terrestrial surveys will not be economically reasonable (for example, scanning huge fields for solar panel farms for the depth of bedrock and presence of rocks)
Drone-mounted GPR implements the motto “safer, cheaper, faster.” Here are a few situations where the use of GPR on the drone is beneficial

Fig.6 - A drone with Zond Aero LF GPR is taking off to scan the dangerous site with coal burning underground. The picture courtesy of DATUM Ingeniería SAS.
Why do we need different GPR systems?
All GPR systems use the same principles but vary in application due to different antenna frequencies:
The antenna design reflects:
The variety of GPR's ensures the right system for every subsurface investigation needs.
Zond Aero LF with 50 Mhz 3m long antenna
Deepest possible penetration - up to few dozens of meters in very-low conductive soils (dry sand or rocks), or hundreds of meters in ice - making this system an excellent tool for glaciology and deep scanning.
Zond Aero LF with 75…400Mhz antennas
Zond Aero LF on drones like DJI M350/M300 RTK can be used with antennas in frequency range 75…400Mhz, allowing to select appropriate frequency for a particular application. Changing the antenna takes a couple of minutes.
Zond Aero 500 Mhz
A pretty universal system with a shielded antenna is capable of penetrating deep enough for many applications of engineering geophysics and detecting relatively small objects or thin utilities.

Zond Aero 1000 Mhz
Best possible resolution and possibility to detect small targets, but penetration under the surface in normal conditions will be less than 0.5m.
Typical applications
The table provides a summary of what we can expect from the GPR systems available for drone use and their recommended applications. Here, we listed GPR systems manufactured by Radar Systems Inc., Latvia, as this line of GPR covers all possible applications for drone-mounted Ground Penetrating Radars. Any other GPR systems with similar center frequency will have more or less the same practical parameters regarding penetration and resolution.
Please note that penetration and resolution in certain places depend on soil composition, humidity, temperature, etc. In the table below, we used the parameters of a typical “average soil”—some substance with a relative dielectric permittivity of 9, low conductivity, and low water content.
By request, Zond Aero LF GPR systems may come with antennas for custom central frequencies.
Best Practices for Using the GPR System
These are the tips for effectively utilizing the GPR system. This is not an exhaustive list, and we are always ready to discuss your specific solution in detail.
-

-

-

-
Since, in the case of airborne use (when the GPR antenna is not in contact with the surface), a significant part of GPR impulse energy can be reflected from the surface, expected penetration from a drone is half of that achieved with a terrestrial survey on the surface. The recommended altitude (or the distance between the antenna and the surface) in the case of an airborne survey should be less than the length of the EM wave in the air corresponding to the central frequency of the antenna.
-
Penetration in good conditions, like very dry sand in the desert after the dry season, can be up to 2 times better. In ideal conditions (snow and ice), penetration can be 3-4 times better. Conditions like dry sand or snow/ice are also very good for airborne use. If the recommended altitude is maintained, we don’t see any significant degradation of maximum penetration into ice or snow compared with terrestrial use.
-
The minimum size of a detectable object is the diameter of the top flat surface of an underground object oriented horizontally. Sometimes (depending on the GPR travel direction), it is impossible to detect a sheet of metal even twice the minimum required size if, for example, it is positioned at a 45-degree angle.
-

-

-

-
The minimum diameter of detectable conductive objects (metallic pipes, water-filled plastic pipes) is estimated as 40% of the GPR central frequency wavelength in a host material (source: Ground‐Penetrating Radar for Geoarchaeology, Lawrence B. Conyers).
-
NEVER plan surveys using estimations close to the penetration limits, size of detectable objects, etc. Always use more conservative values.
-
A typical mistake of new GPR users is ordering a GPR system with maximum penetration and trying to detect smaller subsurface objects with it. Remember – good maximum penetration means poor resolution/capability to detect small objects.
-
-

-

-
“Minimum size” or “Minimum diameter” means that you are extremely unlikely to detect smaller objects. But it is not guaranteed that it will be possible to detect bigger objects – that will depend on dozens of other factors.
-
The diameter of the flat detectable reflector is estimated using a "rule of thumb" as 10% of the distance between antenna and object (antenna elevation + depth) OR half of the wavelength in host material—whichever is bigger.
-
The minimum diameter of empty detectable plastic pipes is estimated as GPR central frequency wavelength in air divided by 2.
-

-

-

-
When ordering a new GPR system for a particular application, please consider what penetration is necessary, i.e., do not exceed it too much. Potential customers often ask for a system for utility search with a maximum penetration of up to 20m. However, the usual depth of pipes/cables is 1-2m. It’s much better to order a 500 Mhz system, which will allow the detection of smaller/thinner objects.
-
A clay layer with even a small amount of water will ruin the acquired image. If there is clay or clayey soil in the survey area, the survey must be planned after a dry season or a long period of dry weather.
-
Electromagnetic waves don’t penetrate through salt water. So, GPR can’t be used for sea/saltwater bathymetry.
GPR calculator by SPH Engineering
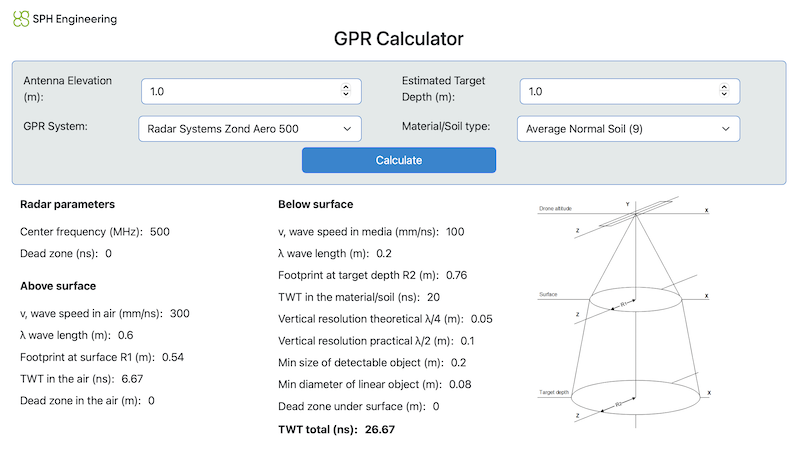
The GPR calculator can be used to estimate the detectability of targets at a particular depth and flight altitude (antenna elevation).
Enter information about Antenna Elevation, type of GPR system, Estimated Target Depth, and Material/Soil type to get the results.
- Fig.7 - GPR calculator by SPH Engineering
Data Sets
Discover the large collection of data examples for different GPR systems and applications by SPH Engineering »»»
Case Studies
-

Drone-based GPR system for alpine glaciological applications
-

Drone-based GPR for Retaining Wall Quality Control
-

Drone-based GPR and Echo Sounder for Mining Operations Enhancement
-

Airborne GPR System for safer and more efficient Snow and Ice Studies
-

High-frequency airborne GPR system for bathymetric surveys
Frequently Asked Questions
How complex is GPR data processing?
In most situations, data processing is simple and straightforward and requires just a few operations:
1. Load RAW data from the sensor into processing software
2. Remove background signal (constant noises) that hides reflections from objects or features of interest
3. Increase the gain (amplification) of the signal to make subsurface reflections visible better and unveil weak anomalies
If you don’t see your targets of interest after just these simple steps, most probably the thing you are looking for is not there, or data quality is bad, or subsurface conditions don’t allow the electromagnetic energy to penetrate deep enough and return to the receiver antenna of GPR. More complex processing steps can increase the contrast of anomalies and may allow extracting additional information about targets, but can’t help to find something in “scrap” data.
| Central frequency, MHz | 1000 | 500 | 300 | 150 | 100 |
| GPR model | Zond Aero 1000 | Zond Aero 500 | Zond Aero LF | Zond Aero LF | Zond Aero LF |
| Penetration from surface, m | 0.5 .. 1 | 2 .. 4 | 4 .. 8 | 8 .. 15 | N15 .. 20 |
| Penetration from the drone, m | 0.3 .. 0.5 | 1 .. 2 | 2 .. 4 | 4 .. 8 | 7 .. 10 |
| Penetration from the drone in freshwater, m (water conductivity <200 µS/cm) | - | 0.25 | 2 | 4 | 7 |
| Recommended maximum antenna elevation for airborne survey, m | 0.3 (practical limit is 0.6m) | 0.6 | 1 | 2 | 3 |
| Minimum size of detectable objects under the surface from the recommended altitude, cm | 7 | 10 | 20 | 35 | 50 |
| Minimum size of “deep” detectable objects from the recommended altitude, cm | 11 at 0.5m | 26 at 2m | 50 at 4m | 100 at 8m | 180 at 15m |
| Minimum diameter of detectable linear non-conductive objects like an empty plastic pipe, cm | 5 | 10 | 17 | 33 | 50 |
| Minimum diameter of detectable linear conductive objects like a metal pipe or a water-filled plastic pipe, cm | 5 | 8 | 13 | 27 | 40 |
Applications | |||||
| Small object search | |||||
| Glaciology, snow/ice thickness profiling | |||||
| Geological stratigraphy • subsurface stratigraphy • structure • bedrock surface | |||||
| Geotechnical surveys • cavity search • sinkhole search | |||||
| Utility Search • cables • water & sewage pipes • gas pipes • oil pipes | |||||
| Underground infrastructure mapping | |||||
| Archaeology • artifacts • hidden structures • stratigraphy • foundations | |||||
| Archaeology • caves • tombs • tunnels | |||||
| Forensics archaeology | |||||
| Freshwater Bathymetry | |||||
| Mining & Quarrying • rocks • fractures • faults • joints |

